Вход
Вход Регистрация
Регистрация Помощь
Помощь




Теперь еще небольшие траблы (точнее, пока непонятки).
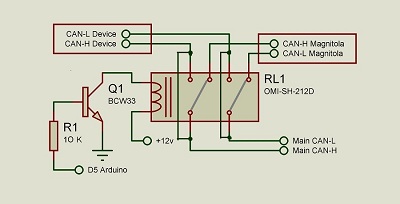
На текущий момент в железе сделано так, что один МК рулит двумя CAN-интерфейсами. (пару-тройку постов выше писал и приводил фото). Оба интерфейса работают.
Проверял следующим образом: сделал отправку в один интерфейс строки "Hello car", в другой: "Hello disp"
Теперь если в диагностический разъем подключать один или второй интерфейс - выводятся на дисплей разные сообщения (т.е. аппаратно - все работает).
Но вот фокус, который хотелось сделать - чтобы мой девайс был "в разрыв" между машиной и дисплеем - не очень пока увенчался успехом:
Со стороны машины все работает, как хотелось...
А вот дисплей, подключенный к интерфейсу (любому интерфейсу моей платы) - молчит, как партизан. Видимо, просто MCP2551 недостаточно, чтобы оно "взлетело" (в машине есть что-то "шинообразующее").
с кабелем и подключением дисплея (внешнего) - все точно в порядке - если его напрямую подоткнуть к диагностическому разъему - он тут же начинает принимать сообщения машины и отображать ровно то же самое, что "штатный".
 WP_20141006_00_12_45_Pro.jpg (475.12К)
WP_20141006_00_12_45_Pro.jpg (475.12К)
Количество загрузок:: 66
Может, кто-то уже сталкивался с этим? Может требуется куда-то подтянуть MS_CAN_L и MS_CAN_V?
В общем, хочется сделать дома "макет" шины машины: чтобы можно было к моей плате подключить дисплей и в комфортных условиях вести разработку прошивки.
 Цитата
Цитата

 (в какой-то момент дисплей моргнул и показал строку, которую должен был выводить)
(в какой-то момент дисплей моргнул и показал строку, которую должен был выводить)


 (или я не знаю, куда смотреть). Но судя по тому, что магнитола флудит без умолку каждый 150мс - этого "времени жизни" просто нет.
(или я не знаю, куда смотреть). Но судя по тому, что магнитола флудит без умолку каждый 150мс - этого "времени жизни" просто нет.